Статистика
Онлайн всего: 1 Гостей: 1 Пользователей: 0
|
Каталог статей
Электропривод и элементы систем автоматики
8.1.ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Oпределение: Электропривод предназначен для приведения в движение различных машин и механизмов. Он состоят из электрического двигателя, аппаратуры управления и передаточных звеньев от двигателя к рабочей машине. Привод бывает групповым, индивидуальным и многодвигательным.
В первом случае один двигатель приводит в движение несколько машин, а во втором каждая машина снабжена своим двигателем.
Многодвигательный привод - это группа двигателей одной машины, где каждый двигатель приводит в движение отдельный механизм.
Из основных требований, предъявляемых к электроприводу, следует отметить следующие:
1. Электродвигатель должен обладать такой мощностью, чтобы он передавал не только статическую нагрузку, но и кратковременные перегрузки.
2. Аппаратура управления должна обеспечить все требования производственного процесса машины, включая регулирование частоты вращения, реверсирование и др.
8.2.УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
При работе электропривода вращающий момент электродвигателя должен уравновешивать статический момент сопротивления рабочей машины, а также динамиче-ский момент, обусловленный инерцией движущихся масс. Уравнение моментов электропривода можно записать в виде:
где М - вращающий момент электродвигателя; Мс - статический момент сопротивления; Мдин - динамический момент. Динамический или инерционный момент, как известно из механики, равен:  где j - момент инерции движущихся масс, приведенный к валу двигателя, кг/м2; w - угловая частота вращения вала двигателя, с-1. Выражая угловую частоту вращения через число оборотов n, получим:  Уравнение моментов электропривода можно записать в другом виде: 8.3.ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ И ЭЛЕМЕНТЫ
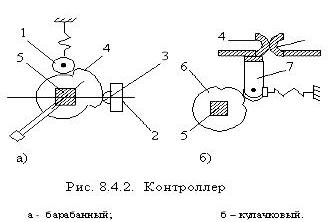
Самым простым и распространенным аппаратом для включения и отключения электрических цепей является рубильник. Разновидностью рубильника является переключатель, способный перекоммутировать схему, например, при реверсировании или переключении обмоток двигателя со "звезды" на "треугольник". Рубильник состоит из контактного ножа и двух губок, смонтированных на изолированном основании. Одна из губок является шарнирной. По количеству контактных ножей рубильники бывают одно-, двух- и трёхполюсными. Управление рубильником осуществляется изолированной ручкой, объединяющей контактные ножи. Иногда при управлении, электродвигателями или другими исполнительными механизмами используются пакетные выключатели. Это малогабаритный отключающий аппарат, как правило, круглой формы (рис. 8.4.1.). В неподвижные кольца 5 из изоляционного материала вмонтированы контакты 3. Внутри колец размещаются подвижные диски 8 с контактными пластинами, закрепленными на оси 7. В крышке 6 помещено пружинное приспособление, с помощью которого достигается быстрое замыкание и размыкание контактов, независимо от скорости поворота ручки 1. Выключатель собирается и крепится к крышке с помощью скобы 4 и шпилек 2. Для управления двигателями с фазным ротором требуется большое число переключений, необходимых для ввода или вывода дополнительных сопротивлений. 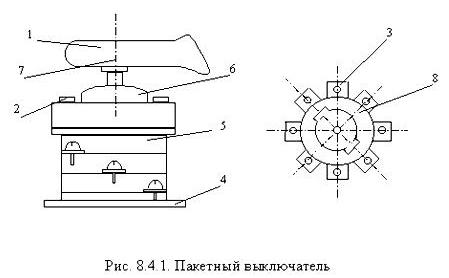 Эту операцию выполняют контроллеры, которые различают на барабанные и кулачковые (рис. 8.4.2 ). Подвижные контакты барабанного контроллера, имеющие форму сегментов 4, крепятся на валу 5. Неподвижные контакты 3 размещаются на вертикальной рейке 2 и к ним присоединяются внешние цепи. Контактные сегменты соединяются друг с другом по определенной схеме, и, кроме того, они имеют разную длину дуги. При повороте вала контроллера сегменты поочередно входят в соприкосновение с неподвижными контактами, и осуществляется включение или отключение цепи. Вал контроллера снабжается фиксатором 1, обеспечивающим ему несколько фиксированных положений. Кулачковые контроллеры совершеннее барабанных. На валу 5 крепятся диски фасонного профиля 6, которые воздействуют своей боковой поверхностью на ролик контактного рычага 7, определяя тем самым замкнутое или разомкнутое положение контактов 4 и 3. Переключения в силовых цепях с помощью контроллеров требует от оператора значительных физических усилий. Поэтому в установках с частыми переключениями для этой цели используются контакторы. Принцип действия их основан на использовании в управлении силовыми контактами электромагнитной системы. Конструкция контактора приведена на рис. 8.4.3. 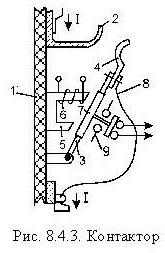 На изолированной плите 1 жестко укреплен неподвижный силовой контакт 2. На рычаге 3 шарнирно прикрепленном к плите имеется подвижный силовой контакт 4. Для управления силовыми контактами на плите смонтирована магнитная система, состоящая из сердечника 5 с катушкой 6 и якоря 7, прикрепленного к рычагу 3. Токоподвод к подвижному контакту осуществляется гибким проводником 8. При подключении к сети катушки 6 произойдет магнитное притяжение сердечником 5 якоря 7 и замыкание силовых контактов 2 и 4. Для разрыва силовой цепи отключают катушку 6, и якорь под собственным весом отпадает от сердечника. Помимо силовых контактов, в аппарате имеется ряд блокировочных 9, назначение которых будет показано ниже. Электрическая цепь катушки электромагнита является вспомогательной или управляющей. Для управления его применяются кнопки управления. Кнопки бывают одноцепные и двухцепные с замыкающими и размыкающими контактами. В большинстве случаев кнопки делаются с самовозвратом, т.е. при снятии механического давления их контакты возвращаются в исходное положение. На рис. 8.4.4 показана конструкция кнопки с двумя парами контактов: замыкающими и размыкающими. Для защиты электродвигателя от перегрузки в контактор монтируются два тепловых реле (на две фазы). В этом случае контактор называется магнитным пускателем. Основной деталью теплового реле (рис. 8.4.5) является биметаллическая пластинка 1, состоящая из двух сплавов с различными коэффициентами расширения. 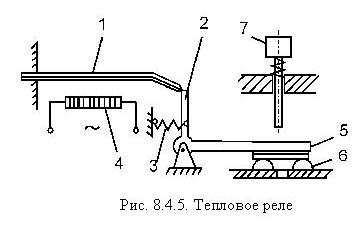 Пластинка одним концом жестко прикреплена к основанию прибора, а другим упирается в защелку 2, которая под действием пружины 3 стремится повернуться против часовой стрелки. Рядом с биметаллической пластинкой помещается нагреватель 4, включаемый последовательно с двигателем. Когда по силовой цепи потечет большой ток, то температура нагревателя повысится. Биметаллическая пластина прогнется кверху и освободит защелку 2. Под действием пружины 3 защелка поворачивается и через изоляционную пластину 5 размыкает контакты 6 в цепи управления пускателем. Возврат реле возможен только после остывании пластины
|
| Категория: Лекция 8 | Добавил: Надежда (04.05.2011)
|
| Просмотров: 2048
| Рейтинг: 0.0/0 |
|
|